The Problem
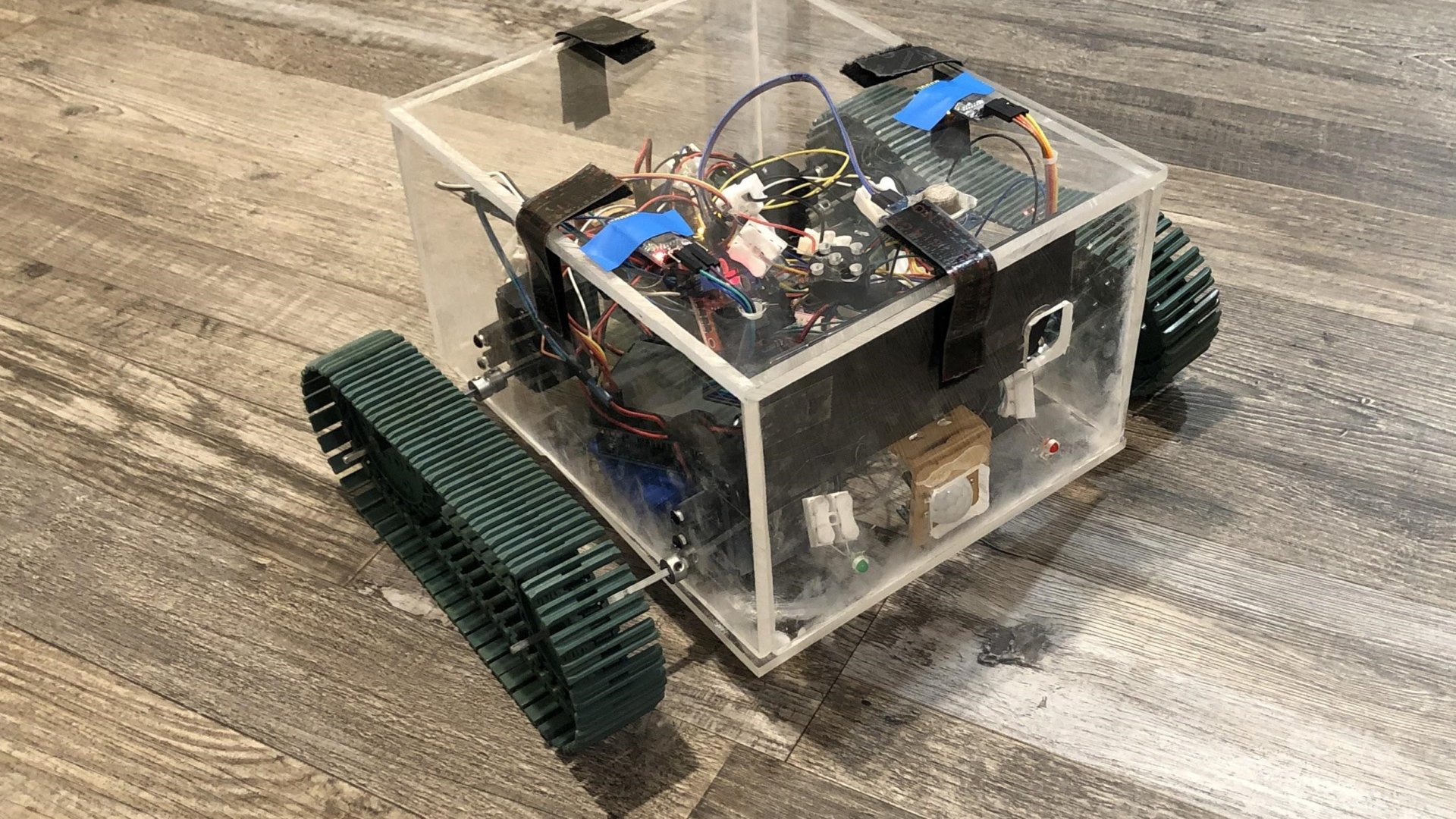
The purpose of this project is to create a cost-effective, yet efficient search and rescue robot. My hypothesis was that using the platform of Arduino and a variety of sensors and modules, a small car could be assembled which would be able to communicate remotely on the environmental status and the location of humans that are trapped, providing vital data to their potential rescue team. We created S.H.I.N.E. (Saving Humans In Need) 1.0 to meet the criteria for the robot, assuring the safe rescue of people in a natural disaster. This robot is a good solution for locating humans, as it not only saves the lives of the people trapped, but it also protects the lives of the first responders who go to help those people in need during those tough times.
Our Plan
We had a long design process where I came up with two plans and then compared the pros and cons of each plan to the criteria listed above. Below are two original proposals Solution 1: Our first idea was a robot made with cardboard as its base and four TT with lightweight rubber wheels. It would have an RCWL-0516 microwave sensor to detect humans that are lost and/or trapped, and an MQ-7 carbon monoxide sensor to detect carbon monoxide that is in the area. A piezo buzzer would be included as well, to make a sound to alert people nearby of the carbon monoxide that is in the air. That way, the people, if they have the opportunity to do so, can stay away from the area. It would have an HC-06 Bluetooth module to be able to control the robot and an Arducam-2MP-Plus, to know where the robot is traveling in real-time. You would use a mobile phone and/or a laptop to stream what the robot is seeing using the camera’s IP address (which you would type into Google). Also, a GSM module would be used to send data in case the PIR sensors picked up any human movement. All of this would be powered with two 9V batteries and one Arduino Uno. Solution 2: The alternative was a simpler and rudimentary design. Instead of cardboard, it would have a pre-made acrylic base. It would still have four TT motors and lightweight rubber wheels, which would be controlled through Bluetooth with an HC-06 Bluetooth module. The motors, as well as the Bluetooth module which controls the wheels, would be powered with its own Arduino Uno (AU1), and two 9V batteries. The first responders can use their phone and install Arduino Bluetooth Control to control the robot wirelessly. It would have a PIR sensor, a green LED, and an HC-05 Bluetooth module to detect if a human has been located. If a human has been located, the green LED will light up, and the reading will be sent onto the global organization\'s laptop or PC (if they have Arduino IDE installed) through Bluetooth. Instead of a camera, it would use the camera on a smartphone which would be mounted onto the robot. First responders can use their phone to receive a video call from the robot. The main difference with this idea is that this prototype would contain a red LED and a piezo buzzer to alert the lost or trapped person, if the person was still conscious, about possible gases and/or smoke that are dangerous. All of the other sensors, that were not connected to Arduino Uno (AU2) which controlled the car motors, would be connected to another Arduino Uno (AU3) with one 9V battery.